
The Modeling and Intelligent Control (MIC) group at IIT Mandi works in the area of control theory,
networked
control system, system modeling, fault-tolerant control and diagnosis and descriptor systems.
 |
Multitank System Introduction:-The Multitank System comprises a number of separate tanks fitted with drain valves. The separate tank mounted in the base of the setup acts as a water reservoir for the system. Some of the tanks have a constant cross section while other are spherical or conical so having variable cross section. The Multitank system has been designed to operate with an external PC based digital controller. The control computer communicates with the level sensors valves and pump by a dedicated I/O board and power interface. The I/O board is controlled by the real time software which operates in MATLAB/SIMulink RTW/RTWI. Applications:- These type of systems are used in liquid or chemical industry for mixturing the chemicals and controlling the outflows of liquids etc. |
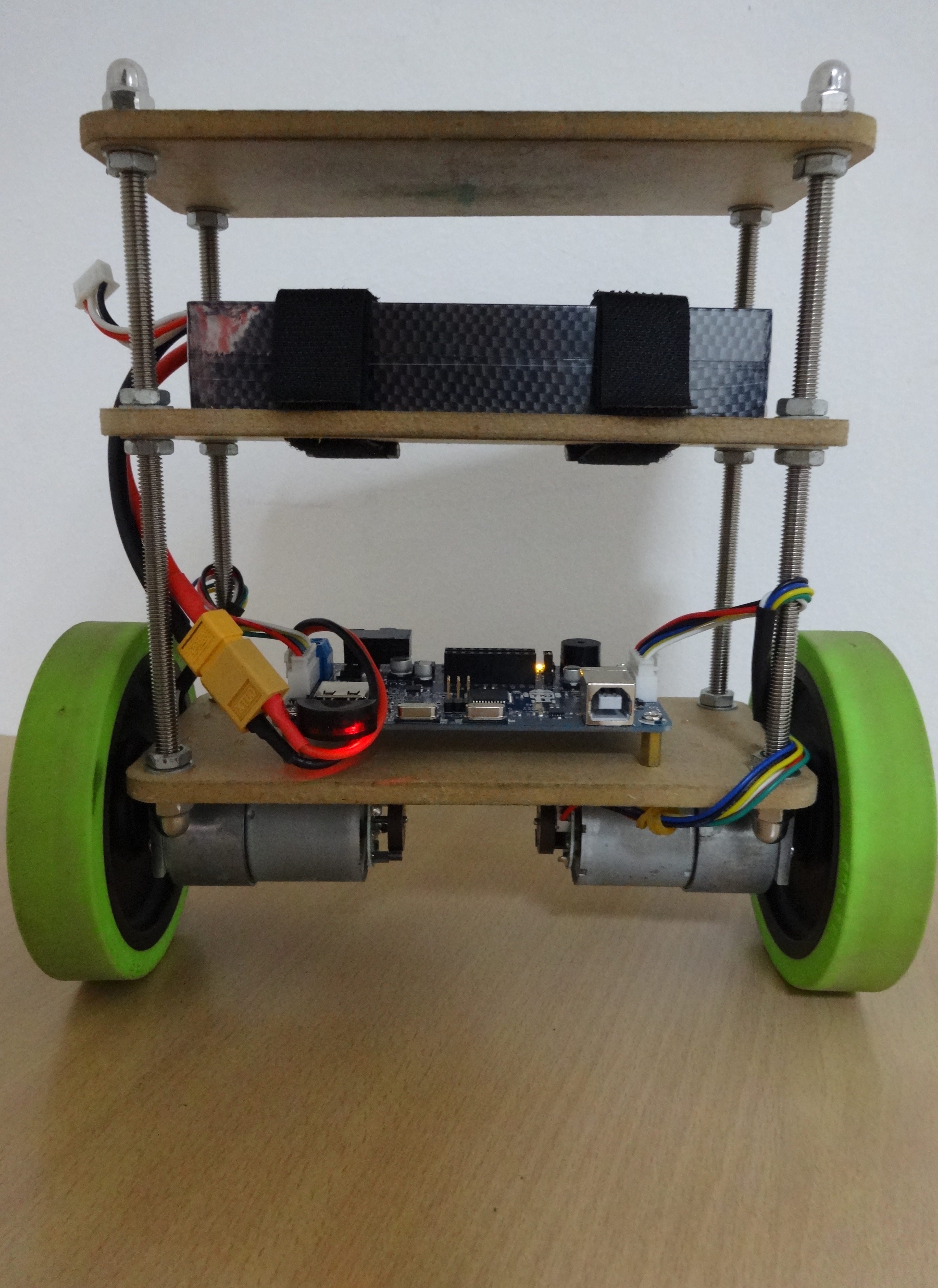 |
Balanduino Introduction:- The Balanduino kit consist of an Arduino compatible main board with the necessary sensors to keep the robot balances automatically. The Balanduino will keep itself balanced right out of the box due to the highly optimized, tuned and preprogrammed PID loop used in the balancing-software controller-algorithm. By combining accelerometer, gyroscope and rotary encoder data, the Balanduino is able to keep itself balanced even when it is pushed. Applications:- They can be even use as vehicles by human, Segway robot can be used in such a way as to travel forward or backward. |
 |
Wind Turbine Emulator Introduction:-Wind turbine emulator mimics the behaviour of wind turbine for hardware level simulations. This system has a DC motor coupled with the Induction generator, speed of which is controlled as per the speed reference calculated by solving the mathematical model of wind turbine. An induction generator is coupled to the DC motor and bidirectional inverter is connected to the terminals of the generator. Researcher can execute the mathematical models of their newly developed or modified wind turbine and can simulate the speed/power of profile of turbine on hardware environment directly for different wind speeds & pitch angle. |
 |
DEXTER ER2 ROBOTIC ARM Introduction:-Robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) is placement. Dexter ER2 Robotic Arm is a 5 Axis robotic Arm + Servo Gripper. It uses 7 metal gear servo motors with 15Kg/cm torque and two servo motors with 7Kg/cm torque. Robot Arm has 5 degrees of freedom which includes: Base rotation, Shoulder rotation, Elbow rotation, Wrist pitch and roll. Out of which Shoulder rotation, Elbow rotation, Wrist pitch has two 15Kg/cm torque servo motors in parallel for giving additional torque. Applications:- Robotics arms are used in industry areas for Painting cars, welding cars etc work. |